Stránka 3 z 7
Re: EGGBOT
Napsal: 16 bře 2016, 21:46
od fulda
... jo a našel jsem si dokumentaci co jsem si udělal.
Je napsaná na zadní straně jízdního řádu pro cestu z hospody

Re: EGGBOT
Napsal: 19 bře 2016, 18:56
od kult.jirka
Ahoj, tak Ti nevim, zapojení mam OK, firmware mam taky dobrej, páč servo reaguje, ale krokáče si ani necuknou

Mam to zapojený na Arduino UNO, piny jsem zapojil podle Tebe a upravil firmware. A NIC, teda po pravdě jsem takovej trudnej

Re: EGGBOT
Napsal: 19 bře 2016, 19:48
od fulda
No já bych ti poradil - vem to na Arduino day a dáme to dohromady

Ale nevím, jestli se ti do toho chce. A nebo ho sem klidně vem v tejdnu, aby jsi stihnul velikonoce
Re: EGGBOT
Napsal: 19 bře 2016, 19:58
od kult.jirka
To by bylo super, ale odkud jsi

Re: EGGBOT
Napsal: 19 bře 2016, 20:08
od kult.jirka
Já pojedu asi sem
http://3dexpo.cz/, ale mam to dost z nohy, tak uvidim

Re: EGGBOT
Napsal: 19 bře 2016, 20:36
od fulda
Já bydlím na samém začátku Prahy, ale to platí jen pro ty, co přijíždějí od Brna. Ostatní by si mohli myslet, že bydlím na jejím konci.
Hele, pokud si jen tak pro jistotu zapojíš ty pololu drivery, tak ti motory krokují??
Nebo alespoň mají snahu se držet v pozici??
Re: EGGBOT
Napsal: 23 bře 2016, 20:25
od kult.jirka
Ahoj Fuldo, tak to mam fakt z nohy

Jinak motory zase nekrokují. v neděli jsem odstranil propojení MS1,MS2,MS3, to jsem měl na plus. A motory krokují. V úterý jsem provedl test a zase nic, ani se to nehlo...
/* MS1 | MS2 | MS3 Microstepping Resolution
-----------------------
L | L | L -> Full Step
H | L | L -> Half Step
L | H | L -> Quarter Step
H | H | L -> Eighth Step
H | H | H -> Sixteenth Step
*/
Teďka mam MS na L L L a připojen na GND.
Kolik se mají nastavit #define XAXIS_MICROSTEPPING 16, když mam Full Step ??? Si myslim, že to bude mít nějakou souvislost (snad). Těch 16 bude určitě na H H H a na plus.
Díky moc
Re: EGGBOT
Napsal: 23 bře 2016, 21:45
od jrt
Když MS1 až 3 nepřipojíš nikam, tak je nastaven Full step.
A jen pro jistotu: Připojuješ doufám ty piny MS1 až 3
na VDD a nikoli na Vmot.
Re: EGGBOT
Napsal: 23 bře 2016, 22:03
od kult.jirka
Ahoj, jasný na 12 V bych to nepřipojil
, teď to mám bez motoru. Na pinech z arduina jsem dal ledky, tam to chodí. Potom na pololu 1A a 1B, 2A a 2B mam ledky antiparalelne a tam nic.
Re: EGGBOT
Napsal: 23 bře 2016, 23:03
od fulda
kult.jirka píše:Kolik se mají nastavit #define XAXIS_MICROSTEPPING 16, když mam Full Step ??? Si myslim, že to bude mít nějakou souvislost (snad). Těch 16 bude určitě na H H H a na plus.
Tím se úplně netrap v první fázi. Je to pochopitelně to číslo "pod lomítkem", takže šestnáctina = 16, polovina =2, full step =1.
Ale to by znamenalo jen to, že ti namaluje 16x větší obrázek, toho si rychle všimneš. to je takové ladění dokonaosti kružnice.
Já mám tak trohu pocit, že ty máš ty pololu tak trochu po smrti.
Udělal bych malé cvičení:
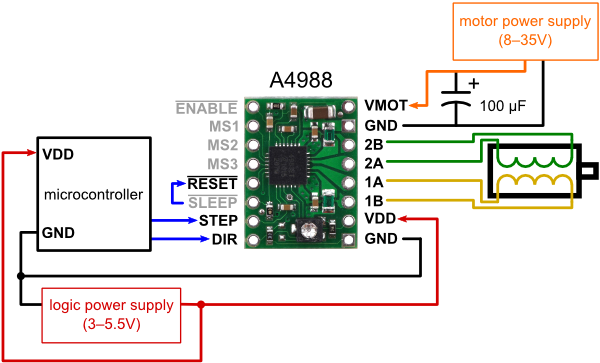
Vem jenom pololu bez arduina, připoj mu napájení 12V Vmot a pomocí nějaké 7805 a kondenzátorů si udělej i 5V, ty také připoj n Vdd.
Vstup ENABLE, MS1, MS2, MS3 a DIR připoj na zem, vstup RESET propoj se SLEEP.
Mezi vstup STEP a VDD připoj odpor, dejme tomu 1K nebo i větší. A pak si vezmi drátek připojenej na zem a ťukej s ním do toho vstupu STEP. Motor se ti musí začít otáčet. Nelekni se, že to nebude právě o krok, protože tam uděláš nějakej šum, ale tak nějak se otáčet bude a bude reagovat na to tvoje poťukávání.
Pokud ne, je něco špatně.
{kind=link}